Protesi bioniche sofisticate: chirurgia plastica, bioingegneria e intelligenza artificiale al servizio della mano

Padova, 3 dicembre 2020 – L’evoluzione dell’uomo e il progresso portano in modo indelebile l’impronta della mano. Attraverso le mani l’uomo ha costruito un futuro sempre più minutamente preciso, strutturato, elaborato. Eppure in Italia ogni anno circa 4 abitanti su centomila subiscono traumi così gravi da determinare l’amputazione di una mano o di parte dell’avambraccio.
La scienza medica, grazie alle sempre più sofisticate tecniche di microchirurgia, in molti casi viene in aiuto con un reimpianto dell’arto stesso ma questo purtroppo non sempre è possibile. Si deve ricorrere così a un arto artificiale che negli ultimi anni da semplice “sostituto inerte” o quasi si sta trasformando in una vera e propria mano bionica grazie ai progressi della chirurgia plastica, della bioingegneria e della robotica.
Da una collaborazione tra l’UOC di Chirurgia plastica di Padova diretta dal prof. Franco Bassetto, il prof. Nicola Petrone del Dipartimento di Ingegneria Industriale dell’Università di Padova, il gruppo di ricerca dell’Università di Scienze applicate della Svizzera Occidentale coordinato dal dott. Manfredo Atzori e dal prof. Henning Müller, Play Cast Srl e Dynatec Studio nasce il progetto di ricerca Pro Hand, finanziato dalla fondazione svizzera Hasler.
“I progetti NinaPro e MeganePro hanno portato al database probabilmente più utilizzato al mondo per il controllo di protesi – spiega il dott. Atzori – I muscoli che muovevano la mano, ancora presenti nell’avambraccio, si contraggono sollecitati dallo stimolo cerebrale del movimento. Gli impulsi elettrici emessi sono registrati tramite sensori e utilizzati per innescare i movimenti della protesi”.
“Quando non è possibile il reimpianto dell’arto, il chirurgo plastico deve prestare la massima attenzione al ‘confezionamento’ del moncone – dice il prof. Franco Bassetto – in quanto dipenderà da questo la possibilità in seguito da parte del paziente dell’utilizzo di protesi, dalle più semplici alle più innovative. L’amputazione deve essere effettuata con metodologia che permetta il più possibile la conservazione dei gruppi muscolari per poter così creare il miglior cuscinetto possibile funzionale all’impianto protesico”.
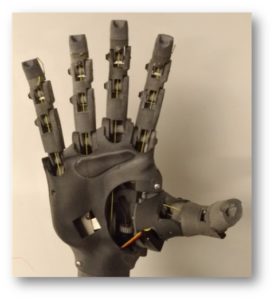
“Grazie al lavoro del nostro Dipartimento abbiamo portato la mano robotica Padovana a prestazioni significative pur con tecnologie e costi accessibili”, spiega il prof. Petrone.
Le protesi mioelettriche oggi disponibili presentano dei limiti, come ad esempio la adattabilità all’utente e la difficoltà di controllo, che i ricercatori italiani e svizzeri stanno provando a risolvere usando la tecnologia della scansione e della stampa 3D della protesi, che permette di ottenere protesi più economiche. Un altro limite è quello della presa vera e propria e della gamma di movimenti possibile: il team ha progettato da un lato un sistema di motori elettrici distribuiti su ogni dito, e dall’altro ha potuto usare i pattern di segnale registrati grazie ai progetti NinaPro e MeganePro per aumentare i movimenti e la loro precisione fino a 36 al momento il numero più elevato pubblicato in letteratura.